

Соблюдение норм социальной/физической дистанции между людьми стало необходимой мерой предосторожности для замедления передачи COVID-19.
Мы представляем новый метод автоматического обнаружения пар людей в местах скопления людей, которые не соблюдают социальную дистанцию, т.е. около 2 метров пространства между ними, используя автономного мобильного робота и существующие камеры CCTV ( Closed-Circuit TeleVision ). Робот оснащен сенсорными датчиками, а именно RGB-D (Red Green Blue-Depth) камерой и 2-D лидаром для обнаружения нарушений социальной дистанции в пределах их диапазона обнаружения и навигации к месту нарушения.
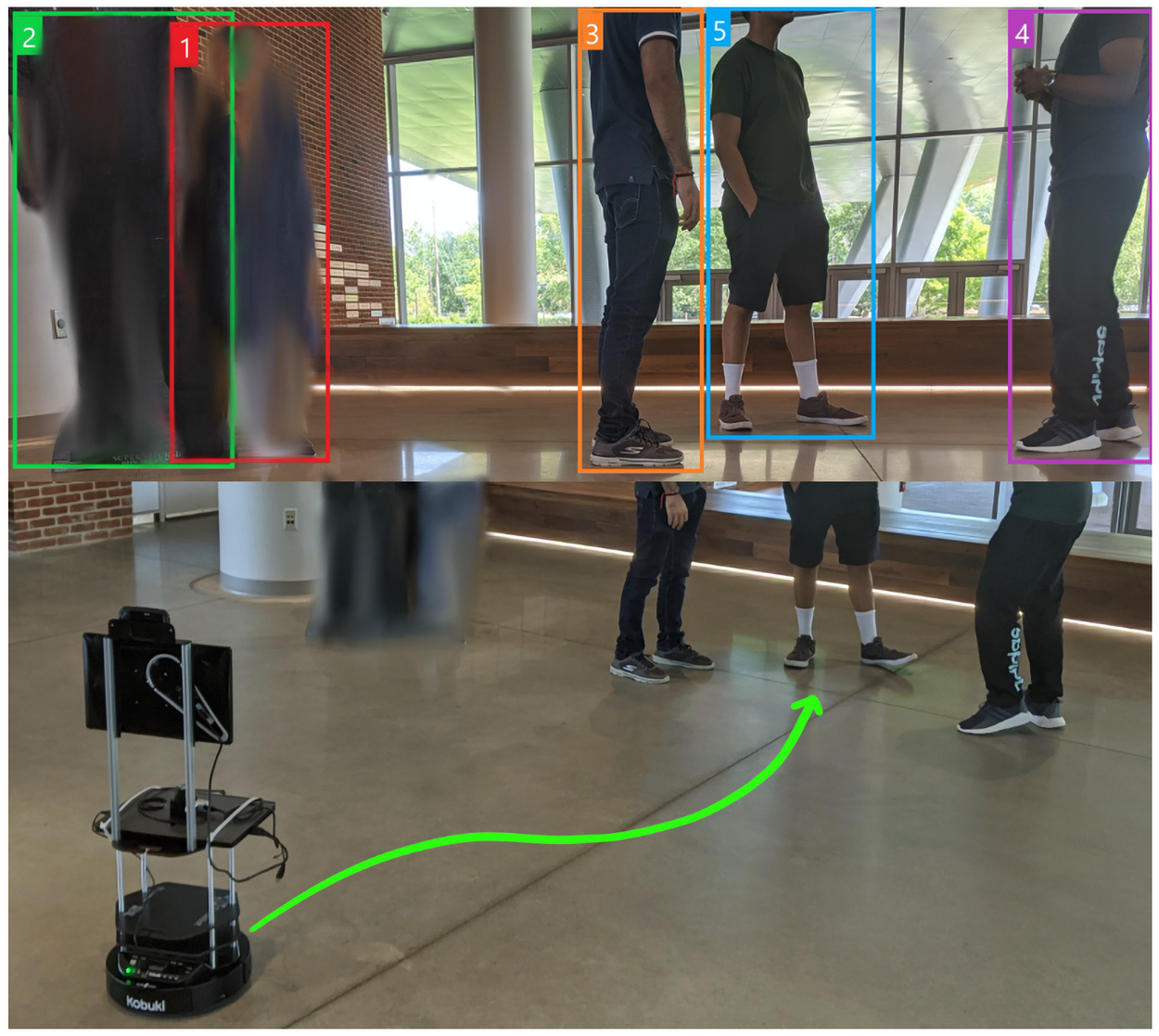
Робот ненавязчиво предупреждает соответствующих людей о необходимости отойти в сторону, выводя сообщение на экран, установленный на нем. Кроме того, мы оснащаем робота тепловой камерой, которая передает тепловые изображения охранникам/медицинскому персоналу, отслеживающему симптомы COVID, такие как повышенная температура. В сценариях внутри помещений мы объединяем мобильную робототехническую установку со статичной камерой видеонаблюдения, установленной на стене, чтобы еще больше увеличить количество обнаруженных нарушений социальной дистанции, точно отслеживая группы людей.
Мы продемонстрировали эффективность нашего метода при локализации пешеходов, обнаружении нарушений и отслеживании идущих пешеходов. Мы также продемонстрировали, что гибридная конфигурация CCTV+робот превосходит конфигурации, в которых только один из двух компонентов используется для отслеживания и предупреждения не соблюдающих нормы пешеходов.
У нашего метода есть несколько ограничений. Например, он не отличает незнакомцев от людей из одной семьи. Поэтому всем людям, находящимся в помещении, рекомендуется держаться на расстоянии 6 футов друг от друга. Наш нынешний подход к выдаче предупреждения нарушающим пешеходам с помощью монитора имеет свои недостатки, и нам необходимо разработать более эффективные подходы к взаимодействию человека и роботов. Поскольку все больше таких роботов-мониторов используются для проверки социальной дистанции или сбора соответствующих данных, это также может повлиять на поведение пешеходов в различных условиях. Необходимо провести дополнительные исследования социального влияния таких роботов. Из-за ограничений COVID мы смогли оценить работу CS-робота только в условиях низкой и средней плотности населения в помещении. В конечном счете, мы хотим оценить работу робота в людных местах и на улице. Мы также хотели бы разработать методы обнаружения того, носят ли люди в окружении робота маски.









